Інерціальна навігаційна система: загальні відомості, принцип дії, класифікація та способи орієнтації
Підвищення вимог до систем визначення координат обумовлює необхідність освоєння нових принципів навігації. Зокрема, однією з умов, які диктує сучасність, стало впровадження відносно незалежних засобів вимірювання розташування цільових об'єктів. Такі можливості забезпечує інерціальна навігаційна система, виключає потреба у використанні сигналів від радіомаяків і супутників.  Інерціальна навігація ґрунтується на законах механіки, що дозволяють фіксувати параметри руху тіл відносно встановленої системи відліку. Вперше цей принцип навігації став застосовуватися відносно недавно в корабельних гирокомпасах. По мірі вдосконалення вимірювальних приладів даного типу виникла методика, що визначає вимірювані параметри на основі прискорень тел. Теорія інерціальної навігаційної системи стала формуватися ближче до 1930 років. З цього моменту дослідники цього напряму стали приділяти більше уваги принципам стійкості механічних систем. На практиці дану концепцію реалізувати досить складно, тому тривалий час вона залишалася лише в теоретичній формі. Але в останні десятиліття з появою спеціальної апаратури на базі ЕОМ кошти інерціальної навігації стали активно використовуватися в авіації, водному техніці і т. д.
Інерціальна навігація ґрунтується на законах механіки, що дозволяють фіксувати параметри руху тіл відносно встановленої системи відліку. Вперше цей принцип навігації став застосовуватися відносно недавно в корабельних гирокомпасах. По мірі вдосконалення вимірювальних приладів даного типу виникла методика, що визначає вимірювані параметри на основі прискорень тел. Теорія інерціальної навігаційної системи стала формуватися ближче до 1930 років. З цього моменту дослідники цього напряму стали приділяти більше уваги принципам стійкості механічних систем. На практиці дану концепцію реалізувати досить складно, тому тривалий час вона залишалася лише в теоретичній формі. Але в останні десятиліття з появою спеціальної апаратури на базі ЕОМ кошти інерціальної навігації стали активно використовуватися в авіації, водному техніці і т. д.
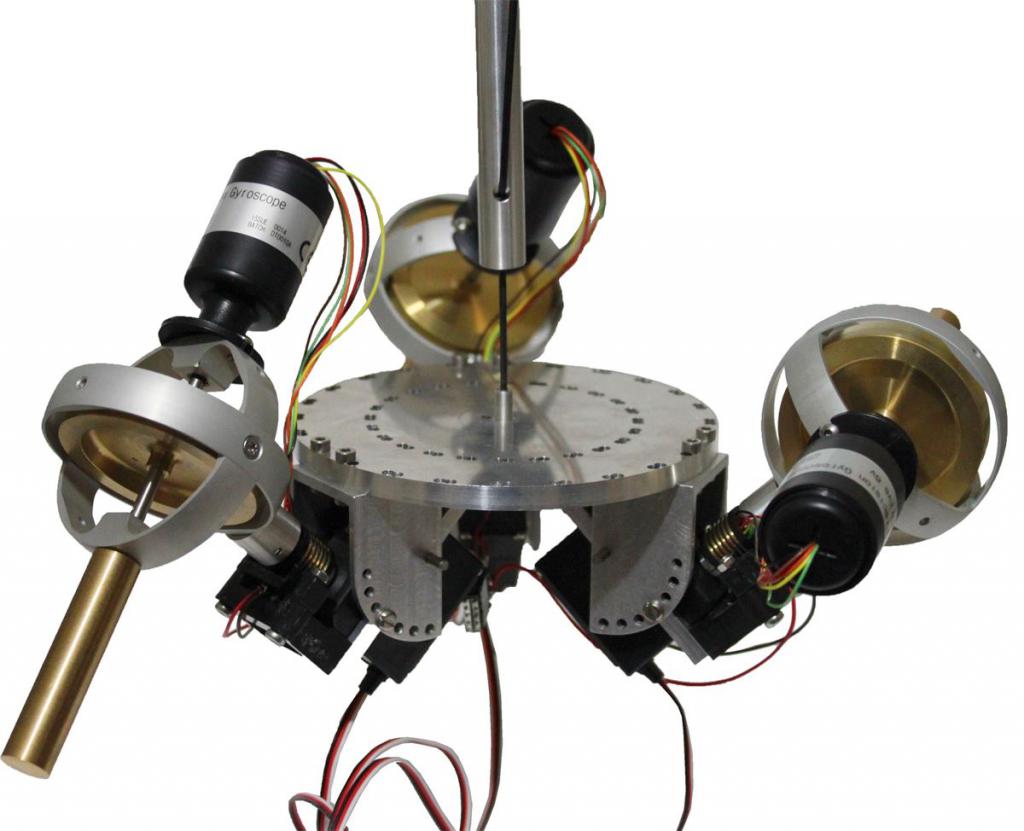
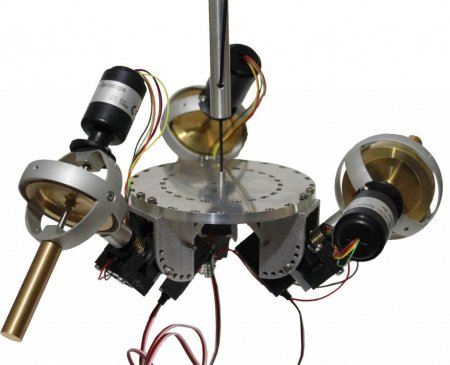 Обов'язковими елементами будь інерціальної системи є блоки чутливих пристроїв вимірювання та обчислювальні прилади. Першу категорію елементів являють гіроскопи і акселерометри, а другу – комп'ютерна техніка, що реалізує певні алгоритми розрахунків. Точність методу в значній мірі залежить від характеристик чутливих пристроїв. Наприклад, достовірні дані дозволяють отримати інерціальні навігаційні системи тільки з гироскопами прецизійного типу в зв'язці з акселерометрами. Але в цьому випадку у технічного оснащення відзначається серйозний недолік у вигляді високої складності електромеханічної начинки, не кажучи про великих розмірах обладнання.
Обов'язковими елементами будь інерціальної системи є блоки чутливих пристроїв вимірювання та обчислювальні прилади. Першу категорію елементів являють гіроскопи і акселерометри, а другу – комп'ютерна техніка, що реалізує певні алгоритми розрахунків. Точність методу в значній мірі залежить від характеристик чутливих пристроїв. Наприклад, достовірні дані дозволяють отримати інерціальні навігаційні системи тільки з гироскопами прецизійного типу в зв'язці з акселерометрами. Але в цьому випадку у технічного оснащення відзначається серйозний недолік у вигляді високої складності електромеханічної начинки, не кажучи про великих розмірах обладнання.
 Метод визначення координат за допомогою інерціальної системи полягає в обробці даних про прискорення тіл, а також їх кутових швидкостей. Для цього, знову ж таки, використовуються встановлені безпосередньо на цільовому об'єкті чутливі елементи, завдяки яким генерується інформація про місцезнаходження, курсі руху, пройдений шлях і швидкості. Крім того, принцип роботи інерціальної навігаційної системи дає можливість застосовувати засоби для стабілізації і навіть автоматичного керування об'єктом. Для таких цілей як раз використовуються датчики лінійного прискорення з гироскопической апаратурою. З допомогою даних пристроїв формується система звіту, працююча щодо траєкторії руху об'єкта. За згенерованої системі координат визначаються кути нахилу і повороту. До переваг цієї технології можна віднести автономність, можливість автоматизації і високу ступінь завадостійкості.
Метод визначення координат за допомогою інерціальної системи полягає в обробці даних про прискорення тіл, а також їх кутових швидкостей. Для цього, знову ж таки, використовуються встановлені безпосередньо на цільовому об'єкті чутливі елементи, завдяки яким генерується інформація про місцезнаходження, курсі руху, пройдений шлях і швидкості. Крім того, принцип роботи інерціальної навігаційної системи дає можливість застосовувати засоби для стабілізації і навіть автоматичного керування об'єктом. Для таких цілей як раз використовуються датчики лінійного прискорення з гироскопической апаратурою. З допомогою даних пристроїв формується система звіту, працююча щодо траєкторії руху об'єкта. За згенерованої системі координат визначаються кути нахилу і повороту. До переваг цієї технології можна віднести автономність, можливість автоматизації і високу ступінь завадостійкості.  У своїй основі розглянуті системи навігації поділяються на платформні та безплатформні (БІНС). Перші називаються географічними і можуть містити дві платформи. Одна забезпечується гироскопами і орієнтується в инерциальном полі, а друга працює під управлінням акселерометрів і стабілізується щодо горизонтальної площини. В результаті координати визначаються із застосуванням інформації про взаємне розташування двох платформ. Більш технологічними вважаються моделі БІНС. Бесплатформенная інерціальна навігаційна система позбавлена недоліків, пов'язаних з обмеженнями у використанні гироплатформ. Функції визначення швидкості і місця розташування об'єктів у таких моделях перекладаються на цифрову обчислювальну техніку, яка також здатна фіксувати дані про кутової орієнтації. Сучасний розвиток систем БІНС ставить за мету оптимізацію обчислювальних алгоритмів без зниження точності вихідних даних.
У своїй основі розглянуті системи навігації поділяються на платформні та безплатформні (БІНС). Перші називаються географічними і можуть містити дві платформи. Одна забезпечується гироскопами і орієнтується в инерциальном полі, а друга працює під управлінням акселерометрів і стабілізується щодо горизонтальної площини. В результаті координати визначаються із застосуванням інформації про взаємне розташування двох платформ. Більш технологічними вважаються моделі БІНС. Бесплатформенная інерціальна навігаційна система позбавлена недоліків, пов'язаних з обмеженнями у використанні гироплатформ. Функції визначення швидкості і місця розташування об'єктів у таких моделях перекладаються на цифрову обчислювальну техніку, яка також здатна фіксувати дані про кутової орієнтації. Сучасний розвиток систем БІНС ставить за мету оптимізацію обчислювальних алгоритмів без зниження точності вихідних даних.

 Теорія інерціальної навігації, концепція якої стала формуватися ще в минулому столітті, на сьогоднішній день може розглядатися як повноцінний розділ мехатроніки. Проте останні досягнення говорять про те, що попереду можуть з'являтися і більш прогресивні відкриття. Про це свідчить і тісна взаємодія інерціальних навігаційних систем з інформатикою та електронікою. З'являються нові амбітні завдання, розширюють простір для розвитку суміжних технологій, також базуються на теоретичній механіці. На даний же момент фахівці в цьому напрямку активно працюють над оптимізацією технічних засобів, базовим серед яких можна назвати мікромеханічні гіроскопи.
Теорія інерціальної навігації, концепція якої стала формуватися ще в минулому столітті, на сьогоднішній день може розглядатися як повноцінний розділ мехатроніки. Проте останні досягнення говорять про те, що попереду можуть з'являтися і більш прогресивні відкриття. Про це свідчить і тісна взаємодія інерціальних навігаційних систем з інформатикою та електронікою. З'являються нові амбітні завдання, розширюють простір для розвитку суміжних технологій, також базуються на теоретичній механіці. На даний же момент фахівці в цьому напрямку активно працюють над оптимізацією технічних засобів, базовим серед яких можна назвати мікромеханічні гіроскопи.
Загальні відомості про технології
Компоненти системи
Принцип роботи системи

Класифікація інерціальних навігаційних систем

Способи визначення орієнтації платформних систем
Не втрачають актуальності і системи, що працюють з платформами для визначення вихідних даних про динаміку об'єкта. На даний момент успішно експлуатуються наступні види платформних інерційних моделей навігації: Геометрична система. Стандартна модель з двома платформами, яка була описана вище. Такі системи відрізняються високою точністю, проте мають обмеження в обслуговуванні високоманеврених апаратів, працюючих в космічному просторі. Аналітична система. Також задіює акселерометри і гіроскопи, які знаходяться в нерухомому стані відносно зірок. До переваг таких систем відносять здатність ефективно обслуговувати маневрені об'єкти на зразок ракет, вертольотів і винищувачів. Але навіть у порівнянні з безплатформної інерціальної навігаційної системою аналітичні комплекси демонструють низьку точність визначення параметрів динаміки об'єкта. Полуаналитическая система. Забезпечується однією платформою, безперервно стабилизирующейся в просторі місцевого горизонту. На цій базі розміщується гіроскоп і акселерометр, а обчислення організуються поза робочої платформи.
Особливості інерціально-супутникових систем
Це перспективний клас інтегрованих навігаційних систем, які об'єднують переваги супутникових джерел сигналу і розглянутих інерційних моделей. На відміну від популярних супутникових систем такі комплекси дозволяють додатково використовувати дані про кутової орієнтації і формувати незалежні алгоритми визначення місця розташування в умовах відсутніх навігаційних сигналів. Отримання додаткових відомостей геолокації дозволяє технічно спрощувати моделі чутливих елементів, відмовляючись від дорогого обладнання. До достоїнств інерціально-супутникової навігаційної системи відносять мала вага, невеликі розміри і спрощені схеми обробки даних. З іншого боку, нестабільність роботи мікроелектромеханічних гіроскопів зумовлює накопичення помилок у визначенні даних.Області застосування інерційних систем
Серед потенційних споживачів технології інерціальної навігації значаться представники самих різних галузей. Це не тільки космонавтика, авіація, але також автомобілебудування (системи навігації), робототехніка (засоби контролю кінематичних характеристик), спорт (визначення динаміки руху), медицина і навіть побутова техніка т. д.Висновок

Цікаво по темі

Як користуватися "Яндекс.Навігатором на телефоні: інструкція
У наведеній нижче статті мова піде про те, як користуватися "Яндекс.Навігатором". Вже з назви можна здогадатися про її призначення. Суть




